

 联系我们
联系我们

1、控制轴组无指定
2、从侧控制轴组错误
3、主侧控制轴组错误
4、主侧、从侧控制轴组错误
5、程序文件控制轴组错误
6、用户坐标文件控制轴组错误
7、机器人间校准文件控制轴组错误
8、工具校准文件控制轴组错误
10、先读运算起点位置控制轴组错误(对adv_st_pos)
11、当前值预置位置控制轴组错误
12、传送带先读运算起点位置控制轴组错误
13、占有控制轴组错误
15、伺服抓手控制轴组错误
18、传送带校准文件控制轴组错误
19、先读运算起点位置控制轴组错误(对dm_st_pos)
20、涂装焊钳指定控制轴组错误
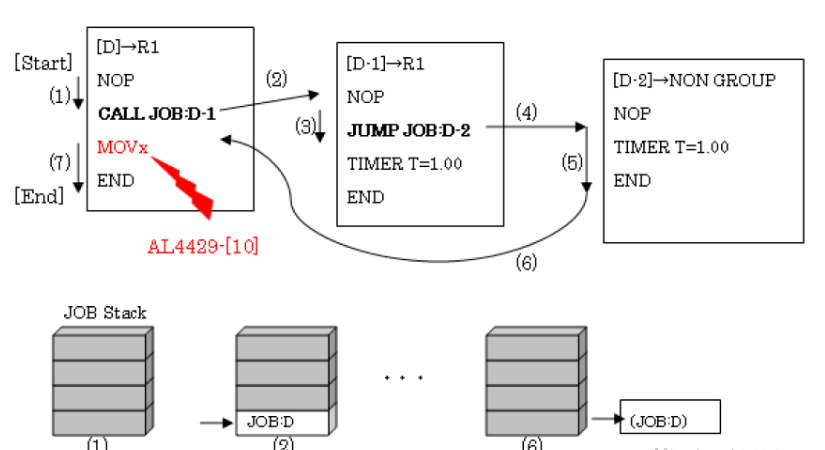
在有控制轴组的程序(下图的[D])中执行CALL命令调用有控制轴组的程序(下图的[D-1]),并在该程序中执行 JUMP:JOB命令,调用无控制轴组的程序。然后,执行END命令或RET命令,从无控制轴组的程序(下图的[D-2])返回到有控制轴组的程序(下图的[D])时,在执行此后的移动命令时,会发生“AL4429:有效控制轴组指定异常[10]”,禁止执行移动命令。此时也请如上述所示,在执行JUMP:JOB命令之前或之后,使用CLEAR STACK命令清除程序堆栈。
- 下一篇:报警代码系列-50(0060)
- 上一篇:安川机器人|报警代码系列-47(0010)
